Raspberry at CAN bus via levelshifter

Raspberry connected to a CAN bus via Levelshifter using SPI interface Levelshifter TXB0108 (TXB0108 8-Bit Bidirectional Voltage-Level Translator With Auto …) CAN Modul MCP251

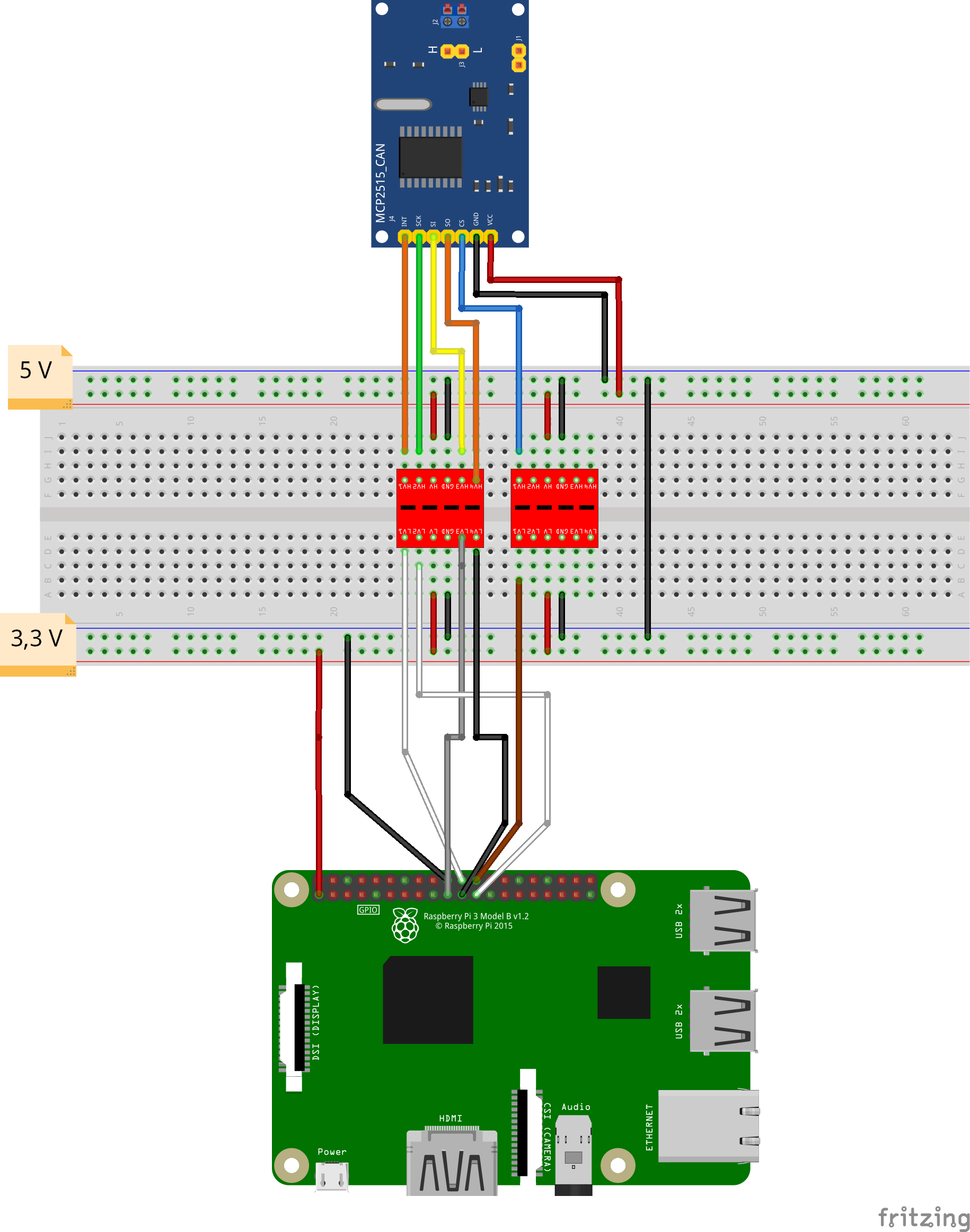
Wiring Raspberry PI
Caution: !!!!!!!!!3,3V vs 5V !!!!!!! -> do NOT connect directly SPI to MCP 2515 as voltag Levels do not fit
- Levelshifter TXB0108 (TXB0108 8-Bit Bidirectional Voltage-Level Translator With Auto …)
- CAN Modul MCP2515
Raspberry
Raspberry
PIN (GPIO)
Function
LevelShifter
3,3V side
LevelShifter
5V side
CAN Modul
19 (12)
SDI
A1
B1
SI
20
GND
GND
GND
GND
21 (13)
SDO
A2
B2
SO
22 (6)
INT
A5
B5
INT
23 (14)
SCK
A3
B3
SCK
24 (10)
CS
A4
B4
CS
- 5 V side level shifter AND CAN Bus Modul with own power supply!
- GND is common for all modules: for the own power supply of the CAN Modul, the Levelshifter (both sides Low Voltage 3,3V + High Voltag 5V and the Raspberry)
CAN-BUS:
L,H and GND
I guess a three wire cabeling including a common mass (GND) beside H and L wire will bring higher stability of the CAN bus expecially havong very long distances
First results
Raspberry terminal opputput with proof that the SPI device is woring with the needed overlay:
pi@HERB-raspi3ModB:~ $ sudo vcdbg log msg
001635.017: brfs: File read: /mfs/sd/config.txt
001635.630: brfs: File read: 685 bytes
….
002286.484: brfs: File read: 4932808 bytes
002292.791: brfs: File read: /mfs/sd/bcm2710-rpi-3-b.dtb
002292.852: Loading 'bcm2710-rpi-3-b.dtb' to 0x4bc4c8 size 0x627f
002432.095: brfs: File read: 25215 bytes
002434.224: brfs: File read: /mfs/sd/config.txt
002434.463: dtparam: spi=on
002449.068: brfs: File read: 685 bytes
002463.373: brfs: File read: /mfs/sd/overlays/mcp2515-can0.dtbo
002481.415: Loaded overlay 'mcp2515-can0'
002481.471: dtparam: oscillator=8000000
002482.292: dtparam: interrupt=25
002483.701: dtparam: spimaxfrequency=500000
002566.096: brfs: File read: 1833 bytes
002579.187: brfs: File read: /mfs/sd/overlays/spi0-hw-cs.dtbo
002592.263: Loaded overlay 'spi0-hw-cs'
003627.251: gpioman: gpioman_get_pin_num: pin EMMC_ENABLE not defined
003743.712: Device tree loaded to 0x2eff9700 (size 0x682a)
003745.794: gpioman: gpioman_get_pin_num: pin SDCARD_CONTROL_POWER not defined
004894.994: vchiq_core: vchiq_init_state: slot_zero = 0xfad80000, is_master = 1
004899.241: hdmi: HDMI:hdmi_get_state is deprecated, use hdmi_get_display_state instead
pi@HERB-raspi3ModB:~ $ ifconfig -a
can0: flags=193<UP,RUNNING,NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
…
……
………
- restuls
==> CAN Bus is there and accessible (in principle)
pi@HERB-raspi3ModB:~ $ ls /sys/bus/spi/devices/spi0.0/net
can0
pi@HERB-raspi3ModB:~ $ ls /sys/bus/spi/devices/spi0.0/net/can0/
addr_assign_type dormant name_assign_type speed
address duplex netdev_group statistics
addr_len flags operstate subsystem
broadcast gro_flush_timeout phys_port_id tx_queue_len
carrier ifalias phys_port_name type
carrier_changes ifindex phys_switch_id uevent
device iflink power
dev_id link_mode proto_down
dev_port mtu queues
- Setup CAN Interface
Setup CAN interface, using 125k baudrate:
pi@piv2:~ $ sudo ip link set can0 up type can bitrate 125000 triple-sampling on
pi@HERB-raspi3ModB:~ $ sudo ip link set can0 up
pi@HERB-raspi3ModB:~ $ ifconfig -a can0
can0: flags=193<UP,RUNNING,NOARP> mtu 16
unspec 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00 txqueuelen 10 (UNSPEC)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
Automatic link config at boot time - if you want to setup interface at startup you could add to /etc/network/interfaces
auto can0
iface can0 can static
bitrate 125000
Turn off the Can bus:
pi@HERB-raspi3ModB:~ $ sudo /sbin/ip link set can0 down
Activate with loopback on (to test if CAN device is OK):
pi@HERB-raspi3ModB:~ $ sudo ip link set can0 up type can bitrate 125000 loopback on
6. Send something (use 2 Terminal Windows)
pi@piv2:~ $ cansend can0 456#43414e2054657374
7. Grab some data from can bus in second terminal windows:
candump any,0:0
pi@piv2:~ $ candump can0
can0 001 [8] 11 22 33 44 55 66 77 88
can0 00003456 [8] EF FE DD AD CB 67 98 AA
can0 00000FE6 [8] EF FE DD AD CB 67 98 AA
can0 0CC [8] EF FE DD AD CB 67 98 AA
can0 0CC [8] EF FE DD AD CB 67 98 AA
^C
pi@piv2:~ $
8. Turn OFF Can device:
sudo /sbin/ip link set can0 down
9. Start CAN device with some settings
sudo ip link set can0 up type can bitrate 125000 triple-sampling on restart-ms 100
sudo ifconfig can0 txqueuelen 1000
10. concret settings:
pi@HERB-raspi3ModB:~ $ sudo /sbin/ip link set can0 down
pi@HERB-raspi3ModB:~ $ sudo ip link set can0 up type can bitrate 125000 triple-sampling on
# read bus for messages
pi@HERB-raspi3ModB:~ $ candump can0
can0 300 [0]
can0 300 [0]
can0 300 [0]
can0 000 [8] 43 41 4E 20 54 65 73 74 --> message to address 000
# send message to bus
cansend can0 000#43414e2054657374
Other commands
Send random packets (some stress test to can bus)
pi@HERB-raspi3ModB:~ $ cangen can0 -v
cangen can0 -g 500 -I C8 -L 8 -D r
-g 500 # gap of 500ms
-I C8 # fixed can ID
-L 8 # length 8 Byte data
-D r # random data
cangen -h .. Help
Analysis
Show the settings and status
pi@HERB-raspi3ModB:~ $ ip -s -d link show can0
3: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UNKNOWN mode DEFAULT group default qlen 1000
link/can promiscuity 0
can <LOOPBACK,TRIPLE-SAMPLING> state ERROR-ACTIVE restart-ms 100
bitrate 125000 sample-point 0.875
tq 500 prop-seg 6 phase-seg1 7 phase-seg2 2 sjw 1
mcp251x: tseg1 3..16 tseg2 2..8 sjw 1..4 brp 1..64 brp-inc 1
clock 8000000
re-started bus-errors arbit-lost error-warn error-pass bus-off
0 0 0 2 2 0 numtxqueues 1 numrxqueues 1 gso_max_size 65536 gso_max_segs 65535
RX: bytes packets errors dropped overrun mcast
40 92 0 0 0 0
TX: bytes packets errors dropped carrier collsns
577 92 9 9 0 0